
机器人或机器人控制器通过 PROFINET 的 GSDML 文件在 SIMATIC 控制器的硬件组态中组态成远程 IO 站。这就充分利用了 PROFINET 的优势来实现机器人和 SIMATIC 控制器之间的数据交换。
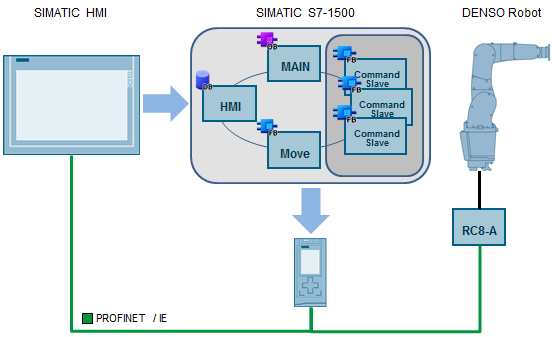

图. 01
PLC 程序通过"Command Slave"功能包提供的功能库对机器人进行控制。这些功能块遵循类似于 PLCopen 的标准,与 SIMATIC CPU 集成的运动控制功能相似。机器人可以通过库里的功能块进行启动和监控,并执行基本的运动指令,如点到点运动、直线或圆周运动等。
机器人受机器人控制器控制, "Command Slave"功能包包含一个命令注释器并安装在机器人控制器上,用于将PLC程序命令传送给机器人。这就确保 RC8-A 机器人控制器的所有运动功能和相关的安全功能为可用状态,并且机器人可以独立于 SIMATIC CPU 负荷执行一般精度的运动功能。
"Command Slave" 功能包在所有装有 RC8-A 控制器的机器人上都可使用。
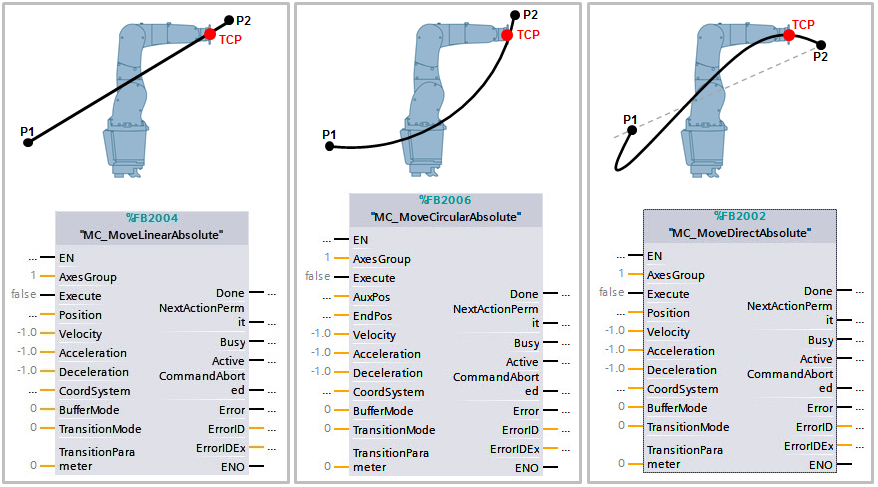
图. 02
当机器人运动是面向事件的并且适用于要执行的任务时,该功能包非常适用于各种手臂应用和简单的轮廓线运动。
使用该功能包有如下优点:
- 所有功能组件,如 SIMATIC 控制器和机器人控制器都通过 PROFINET 连接。
- 机器人集成在 TIA 博途环境中。
- 机器人在工厂标准中的简单集成,包括安全功能。
- 通过一台 HMI 可以对整个工厂的所有机器人进行灵活的和故障安全的操作。
电装机器人欧洲公司提供的功能包适用于 STEP7(TIA博途)环境下的 SIMATIC S7-1500 控制器。控制器对于每台机器人均可以使用至少 256 字节的地址空间。
附加关键词
GSD 文件, Kinematics, Teach In
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc342052.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫