
n
一、功能概述
在运动控制应用中,如果控制轴数很多,需要多个SIMOTION控制器来进行控制,并且在不同的控制器间还需要进行轴的同步运行,例如用两个SIMOTION控制器实现不同生产艺段的控制,其中需要第二个SIMOTION控制器中的轴与第一个SIMOTION控制器中的轴进行同步齿轮运行。为实现上述要求则需要进行分步式同步配置及编程,本文以两个SIMOTION控制器为例,详细描述了配置及编程方法及配置中的各种限制。
分布式同步操作功能允许用户在不同的控制器中建立主轴与从轴的同步关系。在一个项目中可形成基于模块化的机械结构功能组,从轴不再限制与主轴必须在同一个控制器中,可分布在几个控制器中。
同步总线连接
主轴(或外部编码器)与从轴通过控制器间的等时同步PROFIBUS DP总线来连接见图1。n


图1.n
同步总线接口
对于分布式应用使用的等时同步PROFIBUS DP接口,必须被同步。n
二、分布式同步操作的限制条件
分布式同步对象不可以随意建立,必须满足一定的规则。n
2.1 通过PROFIBUS实现分布式同步的通讯/拓扑规则
• 分布式同步操作仅能通过等时同步的主/从通讯实现。
• 主轴或外部编码器必须位于 PROFIBUS 主站中,从轴必须位于 PROFIBUS 从站中。允许本地从轴与主轴进行同步运行。
• 分布式同步运行仅建立在同一个 PROFIBUS 级别上,因此不允许嵌套式的分布式同步。
• SIMOTION 设备可使用不同的 IPO 循环时钟及Servo循环时钟。
• 参与分布式同步运行的SIMOTION 设备必须使用相同的 DP 循环时钟。n
2.2 使用PROFIBUS实现分布式同步的数据传输
对于分布式同步运行的每个主轴与从轴连接通过PROFIBUS接口,每个连接占用 24 个字节的数据输入输出区,主站与每个从站的主从通讯最多可发送和接收 244 个字节,这就说明了主站与每个从站间最大只有10个连接可以建立。
此外,SIMOTION PROFIBUS 主站数据输入输出地址区限制为1 K字节, 与连接的设备数量无关,理论上可以建立 40 个连接。
建议不采用建立多个分布式同步连接的方式,而是采用在从CPU中建立一个虚轴与主站中的主轴相连接,再将从站中的从轴与此虚轴进行同步运行,这样可减少通讯及CPU计算负荷使系统优化。图2为在从CPU中采用虚轴作为主轴以优化系统的示例。n

图2.n
2.3 主-从关系
图3表示分布式同步运行的主-从关系。n

图3.n
2.4 与同步对象的连接
同步对象及 cam 操作必须位于从站控制器中,主数据源(主轴或外部编码器)必须位于主站控制器中。如图4所示:n

图4.n
2.5 嵌套
分步式同步运行可以在从控制器中级联,如图5所示:n

图5.n
但是,分布式同步不能在不同的控制器之间级联运行,即:在分布式同步运行1中的从轴不能为分布式运行2中的主轴。即使第二个PROFIBUS接口配置为“主”也不能实现级联。如图6所示:n

图6.n
2.6 不允许反向配置
在配置了分布式同步运行的主从关系之后,不允许再反向配置,如图7所示:n

图7.n
2.7 等时同步 PROFIBUS 接口连接层次
实现分步式同步的必要条件:
PROFIBUS 连接:
• 必须设置相同的 DP 循环时钟
• 必须设置等时同步时钟
• 主 CPU 及从 CPU 的DP接口必须同步
• 分布式同步运行只能在同一个DP总线段上。
PROFIBUS 拓扑及用于分布式同步的 PROFIBUS 接口连接层次如图8所示:n

图8.n
三、分布式同步运行的配置
本部分描述了如何创建及配置分布式同步运行的设备及对象。其中包含:
• 通过SCOUT创建 SIMOTION 设备
• 在硬件配置中创建网络连接
• 创建同步运行连接
• 同步通讯接口
• 生成同步运行配置n
3.1 通过SCOUT创建 SIMOTION 设备
3.1.1 配置从轴所在的 SIMOTION
a. 新建从轴SIMOTION设备,打开硬件组态画面
b. 建立DP网络,设置DP地址,在属性中选择“Constant bus cycle time”并设置循环时钟(如图9.),将其DP模式选择为“从”模式(如图10.),注意不要勾选“Programming, status/control or other PG functions and nonconfigured communication coection possible”。n

图9.n

图10.n
c. 配置从站数据通讯区,如图11.n
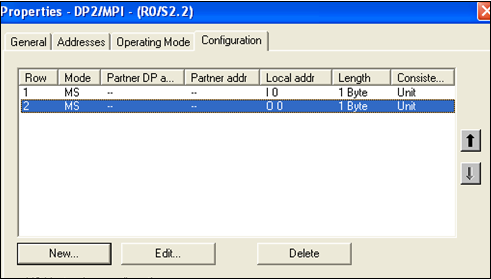
图11.n
d. 编译保存硬件组态后下载至CPU。n
3.1.2 配置主轴所在的 SIMOTION
a. 新建主轴SIMOTION设备,打开硬件组态画面
b. 双击DP网络接口,选择从站中设置的DP总线并设置地址,如图12。n
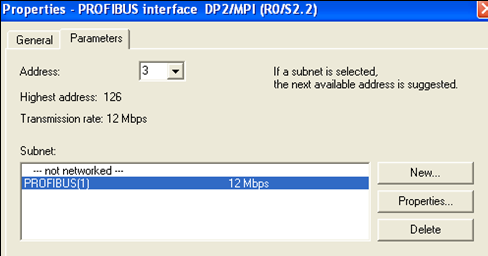
图12.n
c. 设置DP操作模式为“Master”,如图13。n

图13.n
d.将产品目录中“Configured Stations”下的“C2xx/P3xx/D4xxISlave”拖曳至DP总线上,如图14。n

图14.n
e.连接从站,如图15。n

图15.n
f. 配置主站与从站的通讯区,如图16。n

图16.n
g. 编译保存硬件组态后下载至CPU。
此数据区只用于主从通讯的数据交换,与分布式同步运行无关。n
3.2 驱动与轴的配置
3.2.1 在Scout中驱动的配置
在 Scout中,必须对驱动装置 (SINAMICS-integrated)进行配置,可在线或离线进行配置。具体配置方法请参见S120调试手册。
在Scout 中配置完驱动后,通过“Control Panel”运行正常后方可进行轴的配置。n
3.2.2 D435Master中轴的配置
在D435Master中配置一个虚拟主轴“Master_Axis”(图17),D435Slave中配置的虚从轴与其实现分布式同步运行。n
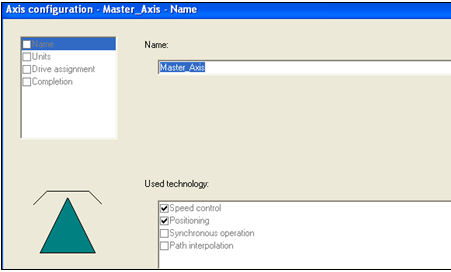
图17n
表 1 虚主轴特性
3.2.3 D435Slave中轴的配置
a.在D435Slave中配置1个虚从轴“Slave_Axis”(图18)及2个实从轴“RA_Slave_RED”,“RA_Slave_BLUE”。
b.“ Slave_Axis”与“Master_Axis”进行分步式同步设置。
c.“RA_Slave_RED”,“RA_Slave_BLUE”两个实轴分别与“Slave_Axis”虚轴进行同步设置。n

图18n
表 2 虚从轴特性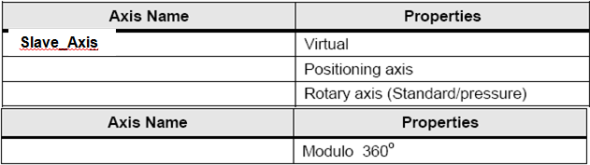
表 3 RA_Slave_RED 特性
3.3 将从站中虚轴与主站中虚轴进行分布同步运行
按照图19 设置从站中虚轴与主轴中虚轴的同步关系n

图 19n
3.4 生成同步操作数据区
编译并保存项目中所有功能。
系统将自动编译硬件组态中的 PROFIBUS IO 配置数据,生成 24 个字节的数据发送区及24 个字节的数据接收区用于分布式同步运行,如图20所示:n
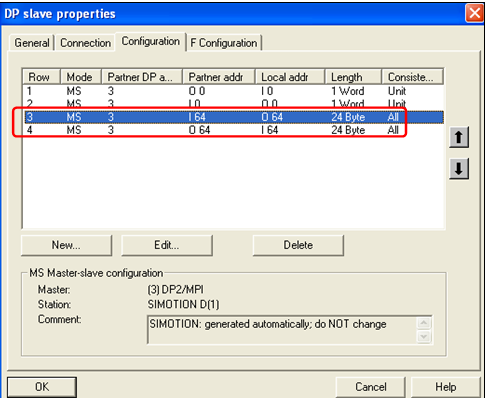
图 20.n
注意:
不要删除通过SIMOTION SCOUT 自动生成的PROFIBUS I/O数据通讯区。否则分布式同步将不能使用。n
3.5 从站中建立与从虚轴进行同步操作的实轴连接关系
按照图21设置从站中实从轴与从站中虚轴的同步关系n

图 21n
项目编译无误后,下载项目至 SIMOTION 设备中。n
四、分布式同步操作编程
4.1同步通讯接口
在从站中使用分布式同步运行前,主从两个DP接口必须被同步。可以通过在从CPU 的“startup task”中调用系统函数 “ _enableDpInterfaceSynchronizationMode
(dpInterfaceSyncMode: =AUTOMATIC_INTERFACE_SYNCHRONIZATION) ”来实现通讯接口同步。
如果两侧的通讯接口实现了同步,可在从CPU的系统变量中显示同步状态信息:“stateOfDpInterfaceSynchronization =DP_INTERFACES_SYNCHRONIZED”。
本例通过ST编程来实现此功能,程序如图22所示:n
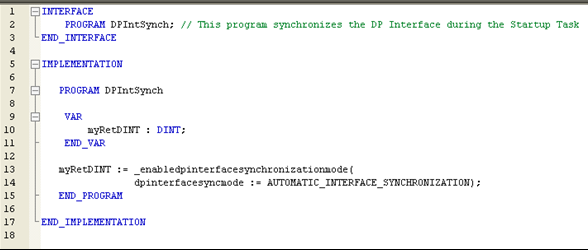
图 22n
4.2 电子齿轮同步MCC命令参数设置
图22,23为同步操作命令参数设置:n

图 22n

图 23n
表 4 将实轴与虚轴进行齿轮同步的参数设置
从轴与主轴解除齿轮同步,如图24:n

图 24
表 5 从轴与主轴解除齿轮同步的参数设置
4.3 同步注意事项
当起动分布式同步运行时,必须确保主轴为“准备好”状态。如果未准备好即对从轴执行系统功能“_enableGearing()” ,则会导致命令中断并产生错误 "50102 Master is not assigned/configured or is faulty (reason: ... )"。
4.4 D435Master程序说明
此程序包含主轴使能,回零,以速度50∘/S运行,如图25所示,将此程序分配至“Montion Task”中。
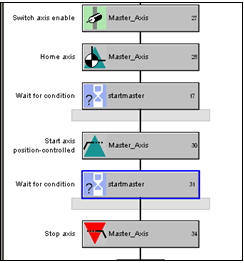
图25
4.5 D435Slave程序说明
此程序包含从轴使能,回零,同步运行及去同步运行,如图26所示:

图26
4.6 编译及项目下载
配置及编程结束后,可将项目编译并下载至 SIMOTION。
注意
SIMOTION 必须在 “Stop”模式而不是“Stop U”,在“Stop U”模式下不可以进行下载操作。
4.7 项目操作
通过使用监控表“control”(图27),可实现轴的同步操作测试。

图27
通过操作监控表中“Startgear”变量控制从轴的同步运行,通过“startgear”变量控制主轴运行。
五、程序参考实例
示例程序请参考附带文件:DisSynByDP.zip。
六、参考文献:
1.SIMOTION SIMOTION SCOUT Technology Objects Synchronous Operation, Cam
32817445
关键词
SIMOTION、PROFIBUS DP、分布式齿轮运行
原创文章,作者:ximenziask,如若转载,请注明出处:https://www.zhaoplc.com/plc326814.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫